Feedback Form

HSO PROJECT
 The
HSO (Hazardous Spherical Objects) project described in issue 4 of GO proved
to be a challenge for sixteen boys from King Edward VI independent school
in Southampton. Their teacher Kieth Farley-Pettman, said "At first sight
Roamer appears to be for young children. Some of my colleagues were sceptical
about using it, but the HSO project proved Roamer had a lot to offer the
brightest 13 and 14 year old pupils." In this article GO reports on the
project's results.
The
HSO (Hazardous Spherical Objects) project described in issue 4 of GO proved
to be a challenge for sixteen boys from King Edward VI independent school
in Southampton. Their teacher Kieth Farley-Pettman, said "At first sight
Roamer appears to be for young children. Some of my colleagues were sceptical
about using it, but the HSO project proved Roamer had a lot to offer the
brightest 13 and 14 year old pupils." In this article GO reports on the
project's results.
Scepticism was not restricted to the staff. The boys had never seen Roamer before and their initial introduction left them feeling indifferent. However, once they started to learn about the robot's procedure, control and sensor capabilities they became more interested.
 |
 |
The main aims of the project was to reinforce the boys knowledge of mechanisms and structures. Tasks were negotiated between the teacher and the class.
The class was split into four groups of four. Some boys worked on all the tasks as a team. Other groups split into pairs: one pair worked on the mechanism design and the other on navigation. Although each group had to 'tender' for a contract to clear the HSOs, they all freely consulted each other.
Since the project took place over several sessions using the Computer Interface, to save programs at the end of one lesson and download them at the next was a great help. "The ability to see the programs on the screen allowed the children to check their program sheets against the program they had keyed into the Roamer. It also helped our presentation of the project to the head and the school governors."
By the end of the project the boys' enthusiasm was quite apparent. Kieth told GO, "We ran out of time to complete the project but I think it is a good measure of the Roamer's success that the boys completed the work and the project trials in their own time.
The Roamer provides a neat programming package. For example, introducing stepper motors becomes very simple. Pupils can concentrate on what to use the devices for, rather than on the complexity of programming them.
As a pilot scheme the project was very successful. Although not all the staff are convinced, CDT colleagues are beginning to realise the product's potential and are looking for ways to use it."
 |
 |
|
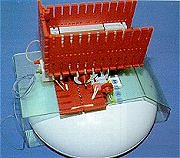
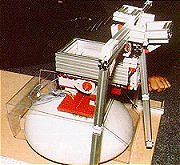
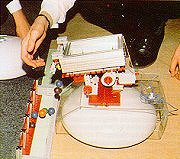
| Two of the tipping mechanisms built onto Roamer: At first the position of the keyboard presented a problem. "That's where we wanted to mount the mechanisms," recalled Kieth Farley-Pettman, we overcame this with a perspex bridging bracket. A hole in the top provided access to the keyboard. The tipping mechanism was mounted effectively with Blu Tack. By making the first instruction a WAlT 10 command there was sufficient time, after GO was pressed, to set the mechanism before the navigation program started." | ||
 |
 |
|
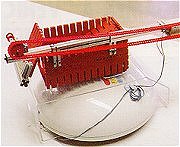
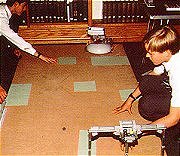
| The starting position. Although the pupils knew about the Roamer's sensors all the groups elected to use dead reckoning. Communication between navigators and mechanism designers was important. For example, the navigators needed to know how much time to allow for the balls to be loaded. | Collecting the HSOs. | |
 |
 |
|
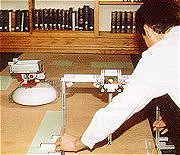
| En-route to the discharge area. | Depositing the HSOs. | |
| Back |
|---|